비행 시간 거리 센서 는 특히 정밀한 깊이 측정이 필요한 분야에서 현대 센싱 기술의 필수 도구로 자리 잡았습니다. 자율적으로 탐색하는 로봇을 제작하든, 정확한 공간 데이터가 필요한 AR 시스템을 구축하든, 다음과 같은 사항을 이해해야 합니다. ToF 센서 can 게임 체인저가 되세요.
이 문서에서는 다음과 같은 작동 원리를 살펴봅니다. ToF 센서와 비교하고, 다른 거리 측정 기술을 살펴보고, 로봇 공학 및 액체 레벨 모니터링과 같은 실제 애플리케이션을 살펴보고, 다중 경로 간섭과 같은 문제를 최소화하는 방법을 다룹니다.
비행시간 거리 센서란 무엇인가요?
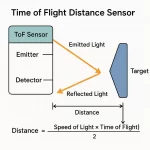
비행 시간 거리 센서는 일반적으로 레이저 또는 LED에서 나오는 빛 펄스가 센서에서 목표물까지 이동했다가 되돌아오는 데 걸리는 시간을 측정합니다. 이 왕복 시간은 빛의 속도에 따라 거리를 계산하는 데 사용됩니다.
공식:
거리 = (광속 × 비행 시간) / 2
위상 기반 또는 삼각 측량 방식과 비교했을 때, 비행 시간 거리 센서는 몇 가지 장점이 있습니다:
| 방법 | 범위 | 정확성 | 속도 |
|---|
| ToF | 길다(최대 수 미터) | 높이(cm 수준) | 빠름(실시간) |
| 위상 시프트 | 보통 | 단거리에서 더 높음 | 보통 |
| 삼각 측량 | 쇼트(1m 미만) | 단거리에서 높음 | 느림(이미지 처리 필요) |
비행 시간 거리 센서는 실시간 3D 매핑에 특히 적합하므로 동적인 환경에 이상적입니다.
비행 시간 거리 센서의 실제 적용 사례
ToF 거리 센서 는 이론적인 경이로움에 그치지 않고 차세대 기술의 원동력이 되고 있습니다.


 레이저 거리 측정기 사냥용
레이저 거리 측정기 사냥용
 신장 측정 곡물 저장용 센서
신장 측정 곡물 저장용 센서
 레이저 거리 측정 애플리케이션
레이저 거리 측정 애플리케이션
 거리 측정 센서
거리 측정 센서
1. 로봇 공학: 장애물 회피 및 내비게이션
다음을 갖춘 로봇 ToF 거리 센서 로봇 공학용 센서는 복잡한 실내 환경에서도 장애물을 동적으로 감지하고 피할 수 있습니다. 빠른 응답 시간과 넓은 시야각 옵션을 갖춘 이 센서는 안전성과 자율성을 향상시킵니다.
2. AR/VR: 3D 깊이 감지
증강 및 가상 현실, 3D 비행 시간 센서 를 사용하여 공간의 깊이를 실시간으로 캡처합니다. 이를 통해 오브젝트 고정, 제스처 추적, 사용자 환경 상호작용을 개선할 수 있습니다.
3. 액체 레벨 모니터링
ToF 센서는 센서에서 액체 표면까지의 거리를 정확하게 측정할 수 있어 산업 및 소비자 애플리케이션을 위한 비접촉식 위생 모니터링을 제공합니다.
다중 경로 간섭 문제 해결
ToF 센서의 주요 한계 중 하나는 방출된 빛이 센서로 돌아오기 전에 여러 표면에서 반사되어 부정확한 측정을 유발하는 다중 경로 반사입니다.
간섭을 줄이는 기술:
- 고급 필터링 알고리즘: 시간 및 공간 필터를 사용하여 허위 신호를 식별하고 억제합니다.
- 센서 위치: 간접 경로를 증폭시키는 모서리와 반사 표면을 피합니다.
- 여러 센서 사용: 여러 ToF 모듈의 데이터를 상호 참조하면 잘못된 판독값을 제거하는 데 도움이 됩니다.
결론: 결론: ToF 센서가 애플리케이션에 적합할까요?
프로젝트에 빠르고 정확하며 컴팩트한 거리 측정 솔루션인 ToF 센서는 성능과 통합 유연성의 강력한 조합을 제공합니다. 다중 경로 간섭과 같은 문제에 영향을 받지 않는 것은 아니지만, 최신 ToF 기술은 특히 AI로 강화된 신호 처리와 함께 빠르게 발전하고 있습니다.
개발자, 엔지니어, 제품 디자이너에게 ToF 센서는 더 스마트하고 안전하며 몰입도 높은 시스템을 구현할 수 있는 길을 열어줍니다.